引言
随着信息技术、人工智能和机器人技术的飞速发展,无人自主系统在军事、航空航天、海洋探索、灾难救援以及智能交通等领域展现出巨大的应用潜力。分布式协同控制作为实现多无人自主系统高效、灵活协作的关键技术,已成为研究的热点。本文将深入探讨无人系统分布式协同控制的技术突破与应用前景。
无人机集群编队控制
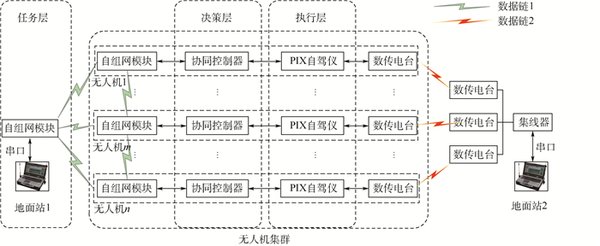
无人机集群技术因其高效率、高鲁棒性、多功能及可扩展性等优秀性能逐渐受到世界各国的重视。无人机集群能够通过空中组网实现集群间的信息共享,并通过人工智能技术和飞控技术达到群体的智能决策,实现协同自主运动,满足各种复杂任务的需求。
编队控制结构
无人机集群编队控制技术形成了集中式、分布式和分散式三种控制结构:
-
集中式控制:指定一台无人机作为集群核心,处理所有信息并下达控制指令。优点是编队精度高,但鲁棒性较差,适用于通信环境良好的小型无人机集群。
-
分布式控制:通过与邻近节点的信息交互实现对集群的控制,降低了信息交互量和计算量,增强了集群的鲁棒性和适应性。
-
分散式控制:采用控制器与无人机一一对应的控制方式,没有控制中心,各节点之间也不存在通信关系,具有可扩展性,但适应性和鲁棒性较差。
编队控制方法
常用的编队控制方法包括领航-跟随法、虚拟结构法、行为法、一致性法、最优控制法和分散模型预测法。这些方法各有优缺点,适用于不同的应用场景。
碰撞规避技术
无人机集群的碰撞规避技术能够极大限度地提升集群的安全性和稳定性,已成为无人机集群协同控制技术中的重要研究内容。
融合编队控制避障技术
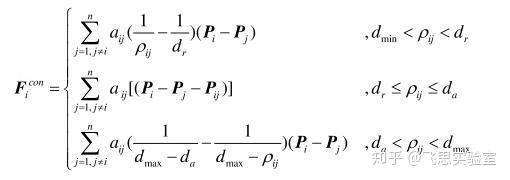
协同避障是指集群内有部分无人机检测到障碍物时,通过集群内的信息交流,使得没有感知到障碍物的无人机也能避开障碍物,达到集群整体避障的目的。常用的协同避障技术通常采用编队控制方法与避障算法相融合的形式,如一致性与人工势场法、一致性与粒子群优化算法、鸽群行为法、分散式模型预测法等。
其他避障避碰方法
除了与编队控制相融合的避障方法外,也有许多考虑通过队形控制实现避障能力或仅考虑避障算法能力的研究,如基于模糊神经网络的无人机实时避障算法、基于鸽群优化与人工势场法融合的局部航迹规划方法等。
跨域无人系统协同控制
跨域无人系统协同控制技术是实现多无人自主系统高效、灵活协作的关键技术。华中科技大学苏厚胜教授的研究围绕跨域无人系统(无人机-无人艇)的多时间尺度和分散性等特点,介绍了多时间尺度下无人“机-艇”协同网络建模与可控性分析,以及分布式观测、分布式区间观测和移动分布式观测等方面的研究进展。
未来挑战与发展方向
未来无人机集群协同控制技术的研究重点和方向主要集中在以下几点:
-
结合视觉定位和构图的协同控制技术:提升无人机集群对环境的感知识别能力,提升控制精度及避障效果。
-
异构无人系统协同控制技术:实现包含无人车、无人船和无人机组成的多种无人系统的精准控制、协同避障、任务分配等问题。
-
结合5G通信的协同控制技术:增强无人机之间的信息传递能力,提升无人机协同控制的时效性。
-
结合人工智能的协同控制技术:利用人工智能技术处理无人机集群的环境信息,使其具备自主感知、控制的能力。
-
具备故障容错的协同控制技术:提升无人机集群的鲁棒性和稳定性,确保无人机基础功能的正常运行。
-
结合自主决策的协同控制技术:提升无人机集群对多元信息的处理速度和能力,优化无人机集群的协同控制性能。
结论
无人系统分布式协同控制技术在军事、民用等领域展现出巨大的应用潜力。通过不断的技术突破和创新,未来无人系统将在更多复杂场景中发挥重要作用,为人类社会带来更多便利和安全保障。






