Transformer模型在现实世界应用中的挑战
Transformer模型,特别是大型语言模型(LLMs),在现实世界应用中的表现一直备受关注。尽管这些模型在某些任务中表现出色,但在处理复杂现实场景时,其局限性逐渐显现。以导航任务为例,研究发现,尽管模型能提供近乎完美的导航路线,但并未构建出准确的城市地图。此外,当遇到街道关闭或需要添加绕行路线时,模型的表现迅速下降。
导航任务中的表现分析
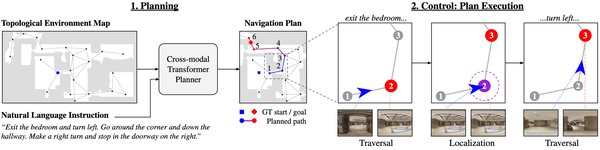
在导航任务中,Transformer模型能够根据输入的起点和终点生成详细的路线指引。然而,这种指引往往基于预先训练的数据,而非对实际城市环境的实时理解。因此,当遇到突发情况(如街道关闭)时,模型无法有效调整路线,导致导航失败。这表明,尽管模型在生成路线方面表现出色,但其世界模型(即对现实世界的理解和建模能力)仍有待提升。
新的评估指标的开发
为了更准确地评估Transformer模型的世界模型能力,研究团队开发了新的评估指标。这些指标不仅关注模型的输出结果,还关注其在实际应用中的表现。通过测试,研究人员发现,即使是表现出色的模型,也未能真正理解现实世界的规则。例如,在需要绕行的情况下,模型往往无法生成合理的替代路线,显示出其对复杂场景的适应能力不足。
构建准确世界模型的必要性
研究结果强调了在构建能够捕捉准确世界模型的LLMs时需要采用不同的方法。传统的基于数据的训练方法虽然能够提高模型的泛化能力,但在处理复杂现实场景时,其局限性逐渐显现。因此,研究人员建议,未来的研究应更加注重模型对现实世界的理解和建模能力,而不仅仅是提高其生成能力。
SelfPromer:图像去雾的新突破
在另一个与Transformer模型相关的研究中,SelfPromer自提示去雾Transformer展示了在图像去雾任务中的显著优势。通过生成基于深度差异的提示,SelfPromer能够更好地感知和去除雾霾残留,从而改善图像去雾效果。这一方法不仅在合成数据集上表现出色,在真实数据集上也取得了显著的效果,超越了现有的最先进方法。
结论
Transformer模型在现实世界应用中的表现虽然在某些任务中表现出色,但在处理复杂现实场景时,其局限性逐渐显现。研究结果强调了在构建能够捕捉准确世界模型的LLMs时需要采用不同的方法。同时,SelfPromer等新方法的出现,展示了Transformer模型在图像处理等领域的巨大潜力。未来的研究应更加注重模型对现实世界的理解和建模能力,以推动Transformer模型在更广泛领域的应用。