具身智能:人工智能的下一个风口
一、什么是具身智能?
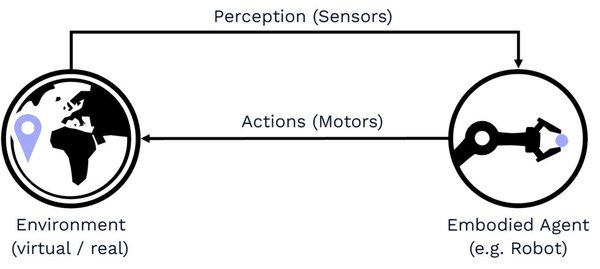
具身智能(Embodied AI)是指强调物理实体与智能体结合的AI系统,通过传感器和执行器与环境互动,实现智能决策的技术范式。具身智能的核心在于“感知-决策-执行”的一体化,其应用领域包括工业机器人、服务机器人、自动驾驶、智能仓储物流、农业无人机等。
二、具身智能与智能体的关系
1. 智能体的定义
智能体(Agent)是一个能够感知环境、做出决策并执行任务的“智能个体”。它可以是一个物理机器人,也可以是虚拟程序。智能体的核心能力是“自感知、自决策、自执行”。
2. 具身智能与智能体的区别与联系
- 区别:智能体强调自主决策和环境交互的能力,而具身智能则强调智能依赖于具体的物理载体(身体)及其与环境的感知-行动耦合。
- 联系:具身智能是一种特殊的智能体,它必须具备物理形态并通过其身体与世界交互。智能体作为能够自主感知、决策和行动的系统,其技术进步为具身智能提供了关键的基础和支持。
三、具身智能的技术路径
1. 技术基础的共享
- 传感器技术:智能体推动了视觉、听觉和触觉传感器技术的发展,这些技术使具身智能系统能够更准确地感知物理环境。
- 决策与规划算法:智能体在决策和规划领域开发的高效算法,为具身智能提供了自主行动的能力。
- 执行器技术:智能体的执行器技术(如电机和机械臂控制)的提升,增强了具身智能系统的物理操作能力。
2. 学习与适应能力的提升
通过强化学习和迁移学习等技术,智能体能够在不同环境中自主优化行为。这种能力为具身智能系统提供了在物理世界中持续改进的基础。
3. 模拟与训练环境的进步
智能体在模拟环境中的训练技术,使具身智能系统能在虚拟世界中快速学习和测试,加速了其在现实世界中的应用。
4. 多智能体协作
多智能体系统的发展,使具身智能系统能够通过协作和竞争优化行为,提升整体智能水平。
四、具身智能的应用前景
1. 自动驾驶
自动驾驶汽车是具身智能的典型应用之一。通过传感器融合、计算机视觉和机器学习等技术,自动驾驶汽车能够实现环境感知、决策规划和车辆控制的一体化。
2. 人形机器人
人形机器人是具身智能的另一个重要应用领域。例如,特斯拉的Optimus人形机器人被视为从电动汽车向机器人生态转型的关键一步。其技术特点基于特斯拉自动驾驶技术(Dojo超级计算机、视觉系统)的延伸,目标实现工业场景下的高精度操作。
3. 智能制造
在智能制造领域,具身智能AGV(自动导引车)和机械臂被广泛应用于生产线,实现无人化装配,提升生产效率,降低人力依赖。
五、具身智能的未来发展趋势
1. 技术路线收敛
尽管具身智能概念越来越火,但其技术路线尚未收敛,主要分为“身体派”和“大脑派”。例如,智元机器人选择在大语言模型上构建属于具身智能的“尺度定律”,用量产机器人采集标准化数据,用数据实现算法模型持续迭代。
2. 量产与商业化
量产是具身智能技术迭代和商业化的关键。例如,智元机器人计划在张江建设年产能力1万台左右的人形机器人二期工厂,推动具身智能量级跃升。
3. 开源与生态建设
开源是推动具身智能发展的重要途径。例如,智元机器人发布了基于全域真实场景的百万真机数据集开源项目“AgiBot世界”,推动具身智能量级跃升。
六、结论
具身智能作为人工智能领域的前沿方向之一,其技术路径和应用前景备受关注。通过技术基础的共享、学习与适应能力的提升、模拟与训练环境的进步以及多智能体协作,具身智能在自动驾驶、人形机器人、智能制造等领域展现出巨大的潜力。未来,随着技术路线的收敛、量产与商业化的推进以及开源与生态建设的深入,具身智能将成为人工智能发展的重要方向,推动人机协同和共生的新时代。










