目标检测是计算机视觉领域的核心任务之一,而Faster R-CNN作为其中的代表性算法,凭借其高精度和高效性,在多个应用场景中展现了强大的能力。本文将从Faster R-CNN的基本原理出发,探讨其在不同领域的应用及优化方向。
区域提议网络(RPN)的核心作用
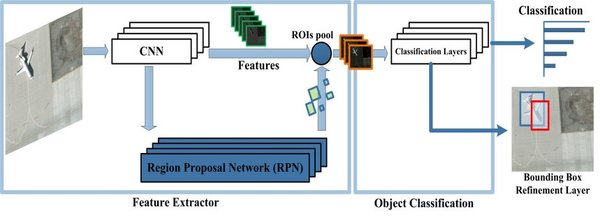
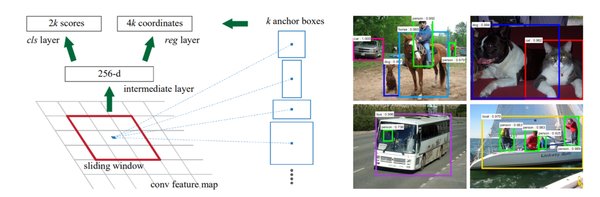
Faster R-CNN的核心创新在于引入了区域提议网络(RPN),该网络能够直接生成高质量的候选区域,而无需依赖外部算法。RPN通过共享全图卷积特征,实现了近乎零成本的区域提议生成。这一设计不仅大幅提升了检测速度,还显著提高了检测精度。例如,在PASCAL VOC 2007数据集上,Faster R-CNN的mAP达到了73.2%,在2012数据集上也达到了70.4%。
在交通标志检测中的应用
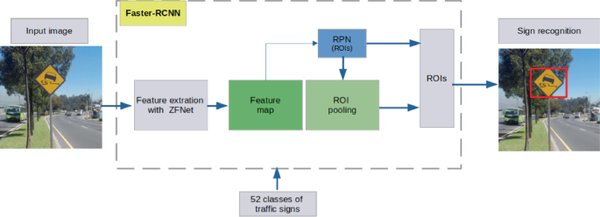
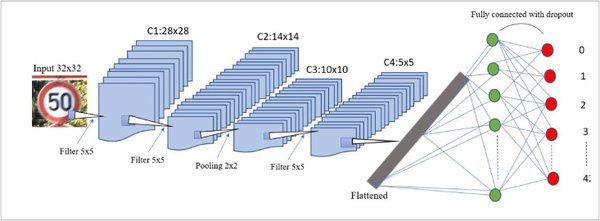
在交通标志检测领域,Faster R-CNN通过优化区域提议网络和特征提取方法,显著提升了检测精度。例如,针对小目标检测问题,研究者提出了一种结合VGG16网络多层特征的方法,有效解决了Faster R-CNN在检测小目标时的局限性。实验结果表明,该方法在禁止、强制和危险三类交通标志的检测精度分别达到了99.53%、98.40%和98.44%,整体检测精度高达99.01%。此外,算法的处理速度接近9.3帧/秒,完全满足实时应用的需求。
在车载车辆检测中的优化
车载车辆检测是另一个Faster R-CNN的重要应用场景。然而,传统的RPN在多尺度锚点生成和特征提取方面存在一定局限性,特别是在处理大尺寸车辆时,检测精度和计算效率受到影响。针对这一问题,研究者提出了一种优化方法,通过调整特征映射和锚点生成策略,显著提升了检测性能。实验结果表明,该方法在KITTI数据集上取得了显著改进,且无需复杂的参数调整和训练技巧。
未来研究方向
尽管Faster R-CNN在多个领域取得了显著成果,但仍有一些问题值得进一步研究。例如,如何优化锚点选择策略以提高检测精度,以及如何改进检测度量方法以提升目标重叠率。此外,针对特定应用场景的优化,如车载行人检测,也是未来的重要研究方向。
总结
Faster R-CNN通过引入区域提议网络,实现了目标检测在精度和速度上的双重突破。无论是在交通标志检测还是车载车辆检测中,Faster R-CNN都展现了其强大的应用潜力。随着研究的深入,Faster R-CNN在更多领域的应用将得到进一步拓展和优化。