
具身智能:AI与机器人学习的未来
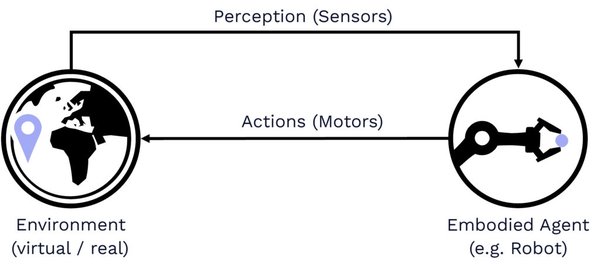
具身智能(Embodied AI)是人工智能领域的一个重要分支,旨在让智能体通过与物理环境的交互来学习和执行任务。这一领域的研究不仅推动了机器人技术的发展,也为深度学习与强化学习的结合提供了新的可能性。本文将围绕DeepTimber-地瓜机器人社群,分享具身智能的入门资源,并介绍Meta的DINO项目和UC Berkeley的深度强化学习课程。

DeepTimber-地瓜机器人社群:具身智能的交流平台
DeepTimber-地瓜机器人社群是一个专注于具身智能与机器人学习的开放社区,为AI爱好者提供了丰富的学习资源和交流机会。以下是社群的核心内容:
-
社区资源:社群汇集了来自全球的研究者与开发者,定期举办线上线下的交流活动,分享最新的研究成果与实践经验。
-
Arxiv列表:社群整理了与具身智能相关的Arxiv论文,涵盖从基础理论到前沿技术的各个方面,帮助成员快速了解领域动态。
-
博客与文章集合:社群成员撰写了大量关于机器人学习的技术博客,内容涉及算法解析、项目实践与行业趋势。
-
Awesome项目集合:社群推荐了多个与机器人学习相关的开源项目,为开发者提供了丰富的学习与实践素材。
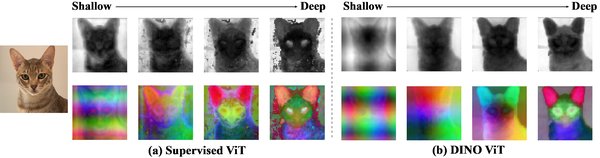
Meta的DINO项目:图像特征提取的利器
在具身智能的研究中,视觉特征提取是一个关键环节。Meta的DINO项目为这一领域提供了强大的技术支持。DINO及其升级版DINO-v2能够提取图像的高层视觉特征,例如不同个体之间的几何特征。例如,在不同图像中,鼻子的视觉特征值可能非常相似,这为机器人识别与理解环境提供了重要依据。
DINO项目的研究成果不仅推动了计算机视觉的发展,也为具身智能中的视觉感知模块提供了新的解决方案。对于DeepTimber-地瓜机器人社群的成员来说,DINO是一个值得深入探索的工具。
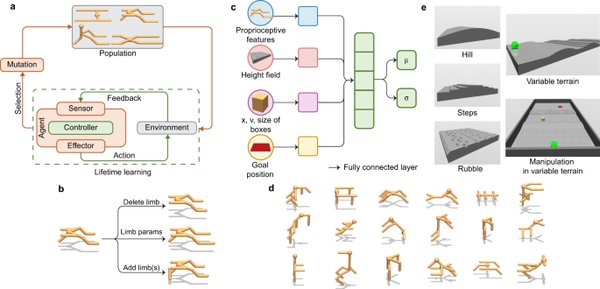
UC Berkeley的深度强化学习课程:理论与实践的结合
UC Berkeley的CS285课程是深度强化学习(DRL)领域的经典课程,由著名教授Sergey Levine主讲。Sergey Levine是DRL领域的权威学者,其团队提出的SAC算法在业界广受认可。
CS285课程内容涵盖了深度强化学习的核心理论与应用实践,包括:
-
基础理论:马尔可夫决策过程、策略优化与值函数估计。
-
前沿算法:深度Q学习、策略梯度方法与Actor-Critic框架。
-
实践案例:课程通过丰富的实验与项目,帮助学员掌握DRL的实际应用。
对于DeepTimber-地瓜机器人社群的成员来说,CS285课程是学习深度强化学习的绝佳资源,能够为具身智能的研究与实践提供坚实的理论基础。
结语
具身智能是人工智能与机器人技术的交汇点,具有广阔的应用前景。DeepTimber-地瓜机器人社群为AI爱好者提供了一个开放的学习与交流平台,而Meta的DINO项目和UC Berkeley的深度强化学习课程则为这一领域的研究与实践提供了重要支持。无论是初学者还是资深研究者,都可以从这些资源中获益,共同推动具身智能的发展。


