
引言
三维重建技术作为计算机视觉领域的核心研究方向之一,近年来取得了显著的进展。从传统的几何重建方法到基于神经网络的隐式表示,三维重建技术在精度、速度和适应性方面不断突破。本文将重点介绍NeRF、3DGS和Fast3R三种代表性技术,探讨它们在自动驾驶、多视角重建等领域的应用及其未来发展方向。
NeRF:隐式表示的革命
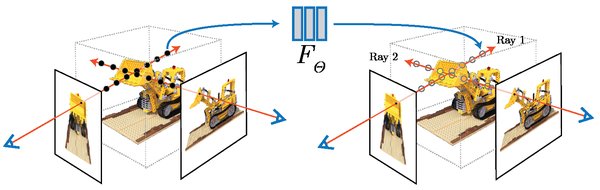
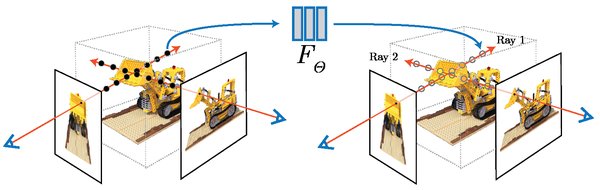
NeRF(Neural Radiance Fields)自2020年提出以来,迅速成为三维重建领域的热门技术。相比于传统的几何重建方法,NeRF通过隐式表示实现了更逼真的渲染效果。其核心思想是将三维场景表示为一个连续的函数,通过神经网络将空间坐标映射到颜色和密度值。NeRF的优势在于其无需显式三维标注,适应性强且易扩展,因此在自动驾驶、虚拟现实等领域得到了广泛应用。
然而,NeRF也存在一些局限性,如计算复杂度高、渲染速度慢等。这些问题促使研究人员不断探索新的解决方案,3DGS便是其中之一。
3DGS:显隐结合的创新
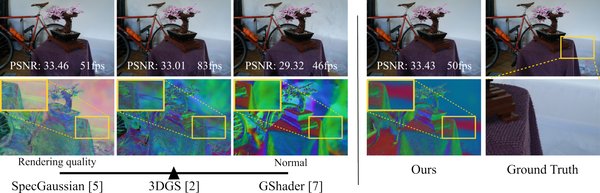
3DGS(3D Gaussian Splatting)结合了显式辐射场的数据存储优势和隐式辐射场的网络优化特点,实现了高速度运行、高质量渲染和高可靠交互的目标。3DGS通过三个关键模块——3D Gaussians表示模块、属性优化模块和实时渲染模块,成功解决了现有算法在速度和质量之间的权衡问题。
在自动驾驶领域,3DGS通过对周围环境的精确感知和快速建模,为自动驾驶系统提供了丰富的环境信息,帮助车辆更好地理解周围环境,从而做出更安全、更有效的驾驶决策。此外,3DGS在场景理解、新视角合成和SLAM(同时定位与建图)等任务中也表现出色。
Fast3R:多视角重建的突破
Fast3R是一种创新的多视角重建技术,能够在一次前向传播中处理多达1500张图片,大幅提升了重建速度。其核心是基于Transformer的架构,能够并行处理多张视图信息,省去迭代对齐的过程。Fast3R在相机位姿估计和3D重建任务中表现出色,显著提高了推理速度并减少了误差积累。
在计算效率方面,Fast3R在单张A100 GPU上表现优异。例如,当处理32张分辨率为512×384的图像时,Fast3R仅需0.509秒,而DUSt3R则需要129秒。这一突破性进展为大规模3D重建应用提供了强有力的支持。
未来展望
随着三维重建技术的不断发展,未来研究方向将主要集中在以下几个方面:
-
结构优化:通过高斯体管理的优化、主体架构的精简等方法提升3DGS技术的性能,使其更加精准、高效和可靠。
-
4D场景重建:将3DGS进一步扩展应用到动态场景中,实现高级别自动驾驶的实时性要求。
-
车辆导航:基于3DGS的导航技术,打破现有导航方法的质量和效率瓶颈,实现自动驾驶导航精度和可靠性的跨越发展。
结论
三维重建技术正在经历一场前所未有的革新,从NeRF到3DGS再到Fast3R,每一次突破都为自动驾驶、计算机视觉等领域带来了新的可能性。未来,随着技术的不断进步,三维重建将在更多应用场景中发挥重要作用,推动人工智能技术的进一步发展。
| 技术 | 优势 | 应用领域 |
| ——— | —————————– | —————— |
| NeRF | 隐式表示,无需显式三维标注 | 自动驾驶、虚拟现实 |
| 3DGS | 显隐结合,高速度高质量 | 场景理解、SLAM |
| Fast3R | 多视角并行处理,高效重建 | 大规模3D重建 |
通过本文的介绍,相信读者对三维重建技术的最新进展有了更深入的了解。未来,这些技术将继续推动人工智能领域的发展,为我们的生活带来更多便利和创新。




