引言
随着人工智能技术的飞速发展,自动驾驶领域迎来了新的突破。浙江大学、上海AI实验室、慕尼黑工大、同济大学和中科大的研究团队提出的LeapVAD技术,结合了大语言模型(LLM)和视觉语言模型(VLM),通过认知感知和Dual-Process思维,实现了更高效的驾驶决策和环境表征。本文将详细介绍LeapVAD的工作原理、技术优势及其在模拟器中的表现。

LeapVAD的技术架构
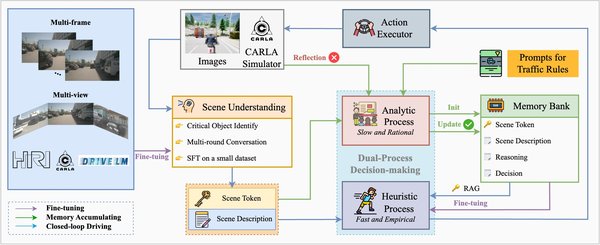
LeapVAD技术框架由四个主要组件组成:
-
视觉语言模型(VLM):用于场景理解,识别关键交通要素。
-
场景编码器:生成紧凑的场景表示,便于快速检索相关驾驶体验。
-
Dual-Process决策模块:模仿人类驾驶的学习过程,包括分析过程和启发式过程。
-
反思机制:从过去的错误中学习,并在闭环环境中不断提高性能。

认知感知与Dual-Process思维
LeapVAD技术通过认知感知和Dual-Process思维,实现了更高效的驾驶决策。具体而言:
-
认知感知:系统识别和关注影响驾驶决策的关键交通要素,通过综合属性(包括外观、运动模式和相关风险)来描述这些目标,实现更有效的环境表征。
-
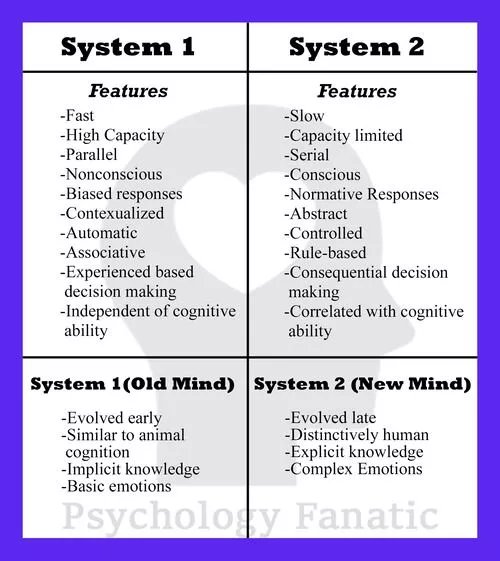
Dual-Process思维:系统由一个通过逻辑推理积累驾驶经验的分析过程(系统 II)和一个通过微调和少样本学习来完善这些知识的启发式过程(系统 I)组成。
技术优势与表现
LeapVAD技术在两个自动驾驶模拟器CARLA和DriveArena中进行了广泛评估,表现优异:
-
高效的环境表征:通过场景编码器网络生成紧凑的场景表示,便于快速检索相关驾驶体验。
-
强大的决策能力:Dual-Process决策模块模仿人类驾驶的学习过程,实现了更高效的驾驶决策。
-
持续改进能力:反思机制和不断增长的记忆库使系统能够从过去的错误中学习,并在闭环环境中不断提高性能。
结论
LeapVAD技术的提出,展示了大语言模型在自动驾驶中的巨大潜力。通过结合认知感知和Dual-Process思维,LeapVAD实现了更高效的驾驶决策和环境表征,为自动驾驶技术的发展提供了新的思路。未来,随着技术的不断进步,LeapVAD有望在实际应用中发挥更大的作用,推动自动驾驶技术的普及和发展。
参考文献
- 浙江大学、上海AI实验室、慕尼黑工大、同济大学和中科大的研究论文“LeapVAD: A Leap in Autonomous Driving via Cognitive Perception and Dual-Process Thinking”







