在人工智能领域,具身智能(Embodied Intelligence)正逐渐成为研究热点。具身智能旨在赋予机器人类人感知、规划、决策和行动能力,其系统涵盖实体、任务和环境。中国电信人工智能研究院(TeleAI)院长李学龙教授及其团队提出了一种大模型驱动的具身智能体协同方法,该方法在多智能体强化学习框架下实现了高效的多智能体信度分配和反馈纠错,提升了大模型驱动的多智能体沟通和协作能力。

技术背景与现状
具身智能作为多领域交叉学科,有望成为人工智能迈向实体机器人的关键突破口。大模型技术发展迅猛,大语言模型、视觉基础模型、视觉 – 语言模型和生成式大模型在自然语言处理、视觉感知和内容生成等方面成果斐然,为具身智能发展提供有力支撑。
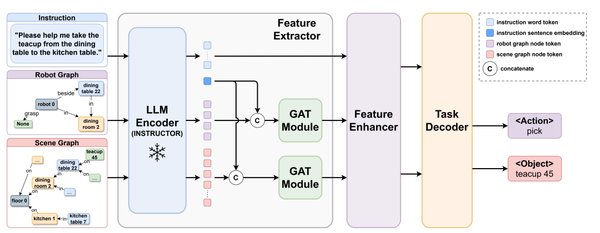
在环境感知领域,引入视觉预训练模型提升了表征泛化性和鲁棒性,同时研究聚焦于Affordance提取和3D视觉表征,以增强机器人对环境的理解。任务规划方面,大语言模型虽能分解任务,但开环规划存在与现实不匹配问题,闭环反馈通过大模型自我反馈、环境反馈和值函数反馈等方法进行改进,同时规划搜索算法也在不断探索。
现存挑战与未来展望
尽管大模型驱动的具身智能取得了显著进展,但仍面临诸多挑战。大模型在特定具身场景适应性差,虚实一体场景构建困难;与人类偏好对齐不足,具身任务需简洁准确指令;具身策略跨域泛化能力弱,环境变化时策略难适用;多智能体协作面临任务分配、沟通协调和伦理问题;真实环境中数据获取、平台安全和策略实时性有待提升。
未来,大模型驱动的具身智能研究将围绕统一具身数据平台、通用具身数据表征、鲁棒具身控制策略、可控具身策略生成、人机合作具身智能、异构智能体协同、轻量化具身策略和人形机器人等方向展开,致力于推动具身智能技术突破与广泛应用。
李学龙教授及其团队的贡献
李学龙教授及其团队提出的大模型驱动的具身智能体协同方法,在多智能体强化学习框架下实现了高效的多智能体信度分配和反馈纠错。这一方法不仅提升了大模型驱动的多智能体沟通和协作能力,还为解决多智能体协作中的任务分配、沟通协调和伦理问题提供了新的思路。
TeleAI作为央企力量,依托中国电信在算力、数据、场景、用户等方面的领先优势,持续致力于引领科技创新、驱动产业发展、满足用户需求,助力实体经济提质降本增效,为国家、产业提供更具信任的人工智能基础。
结语
大模型驱动的具身智能体协同方法代表了人工智能领域的前沿发展方向。随着技术的不断进步和应用的深入,具身智能将在工业、农业、医疗等多个领域发挥重要作用,推动人工智能技术的广泛应用和实体经济的蓬勃发展。李学龙教授及其团队的研究成果,无疑为这一领域的未来发展奠定了坚实的基础。






