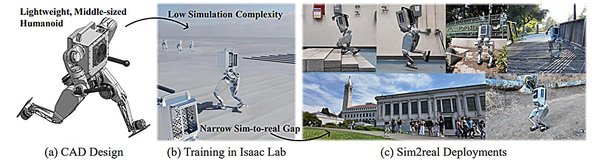
加州大学伯克利分校的研究团队近期推出了一款名为Berkeley Humanoid的新型人形机器人平台。这款机器人以其紧凑、低成本、轻便的设计,为人形机器人控制算法的训练和测试提供了全新的解决方案。其研究成果已在预印本服务器arXiv上发布,引发了广泛关注。
设计特点与优势
Berkeley Humanoid的设计旨在解决传统人形机器人高成本、复杂控制等痛点。以下是其核心特点:
- 低成本:通过优化材料和结构设计,大幅降低了制造成本,使其更适合大规模研究和应用。
- 轻便性:机器人采用轻量化设计,便于移动和部署,同时减少了能源消耗。
- 紧凑结构:其小型化设计使其能够在狭窄空间内灵活操作,适用于多种场景。

运动能力与稳定性
Berkeley Humanoid在运动任务和地形适应性方面表现出色。以下是其关键性能:
| 功能 | 描述 |
|---|---|
| 复杂地形适应 | 能够在不同地形上保持稳定,包括斜坡和不平整地面 |
| 多样化运动 | 支持行走、跑步、跳跃等多种运动模式 |
| 高效控制 | 通过先进算法实现快速响应和精准控制 |
应用场景与未来展望
Berkeley Humanoid的低成本和高性能使其在多个领域具有广泛的应用潜力:
- 科研与教育:为机器人控制算法的研究提供实验平台,同时适合用于高校教学。
- 灾难救援:在复杂地形中执行搜索和救援任务。
- 工业自动化:在工厂环境中完成搬运、装配等任务。
未来,研究团队计划进一步优化其控制算法,并探索更多实际应用场景,推动人形机器人技术的发展。
Berkeley Humanoid的推出,不仅为人形机器人研究提供了新的工具,也为低成本、高性能机器人设计树立了标杆。其创新性和实用性,无疑将在机器人领域产生深远影响。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...









AI-magic收录了大量国内外AI工具箱,包括AI写作、图像、视频、音频、编程等各类AI工具,以及常用的AI学习、技术、和模型等信息,让你轻松加入人工智能浪潮。