
具身智能体协同方法的背景与意义
随着人工智能技术的飞速发展,多智能体系统在复杂任务中的应用越来越广泛。然而,如何实现多智能体之间的高效协同一直是一个挑战。中国电信人工智能研究院(TeleAI)院长李学龙教授及其团队提出了一种大模型驱动的具身智能体协同方法,该方法在多智能体强化学习框架下实现了高效的多智能体信度分配和反馈纠错,显著提升了大模型驱动的多智能体沟通和协作能力。
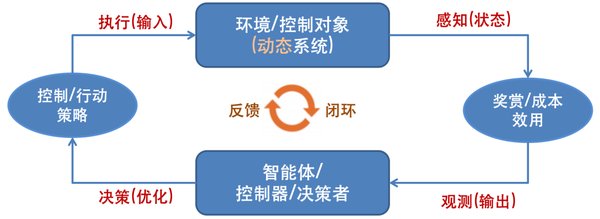
多智能体强化学习框架下的信度分配
在多智能体系统中,信度分配是一个关键问题。传统的信度分配方法往往难以应对复杂的任务环境,导致智能体之间的协作效率低下。李学龙教授团队提出的方法通过引入大模型驱动机制,实现了更加精细和高效的信度分配。具体来说,该方法利用大模型的强大计算能力和学习能力,对每个智能体的行为和贡献进行动态评估,从而优化信度分配策略。
反馈纠错机制的创新
除了信度分配,反馈纠错机制也是提升多智能体协作效率的重要环节。传统的反馈纠错方法往往依赖于固定的规则和算法,难以适应动态变化的任务环境。李学龙教授团队提出的方法通过引入大模型驱动的反馈纠错机制,实现了更加灵活和高效的纠错。具体来说,该方法利用大模型的实时学习能力,对智能体的行为进行动态监控和调整,从而及时发现和纠正错误,提升整体协作效率。
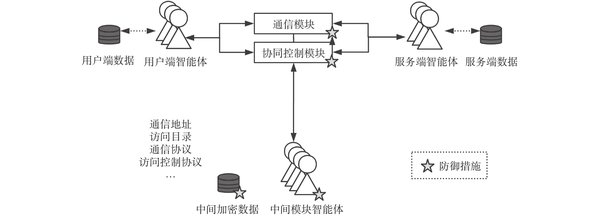
跨平台开发的挑战与解决方案
在实际应用中,多智能体系统往往需要在不同的平台上运行,这带来了跨平台开发的挑战。李学龙教授团队提出的方法通过引入跨平台兼容性设计,确保了多智能体系统在不同平台上的稳定运行。具体来说,该方法利用大模型的通用性和适应性,对智能体的行为进行统一管理和调度,从而确保跨平台协作的顺利进行。
未来发展方向
随着技术的不断进步,具身智能体协同方法将在更多领域得到应用。未来,李学龙教授团队将继续优化和完善该方法,探索其在复杂任务中的进一步应用。同时,团队还将加强与各领域的合作,推动具身智能体协同方法在实际应用中的落地和推广。
大模型驱动的具身智能体协同方法为多智能体系统的协作效率提升提供了新的思路和解决方案。随着技术的不断发展,该方法将在更多领域发挥重要作用,推动人工智能技术的进一步发展和应用。



