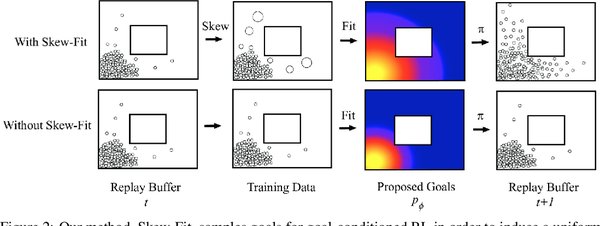
Skew-Fit算法的核心原理
Skew-Fit算法是一种基于最大熵目标分布的强化学习算法,旨在通过最大化目标分布的熵来提升模型的探索能力。该算法通过不断调整目标分布,使其能够覆盖更广泛的状态空间,从而提高模型在复杂任务中的表现。
极端值理论与Skew-Fit的结合
极端值理论在Skew-Fit算法中扮演了重要角色。极端值理论主要用于预测极端事件的发生概率,如洪水、地震等。在Skew-Fit中,极端值理论被用来优化目标分布,使其能够更好地应对极端状态,从而提高模型在极端条件下的鲁棒性。
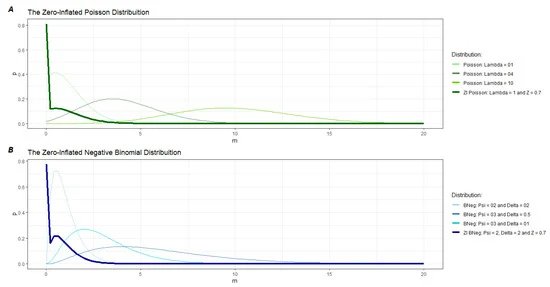
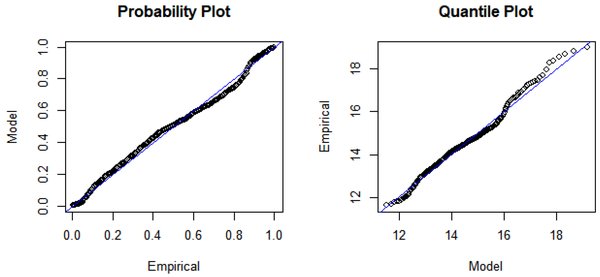
混合模型在Skew-Fit中的应用
在Skew-Fit算法的实现过程中,混合模型被广泛应用于处理零膨胀数据。例如,在哮喘与病毒感染研究(DAVIS)中,混合模型被用来分析呼吸道症状数据,其中超过70%的数据为零。通过结合随机效应Probit/对数偏态正态混合模型,Skew-Fit能够更准确地预测症状的发生概率和严重程度。
Skew-Fit在机器人操作任务中的实践
Skew-Fit算法在机器人操作任务中展示了其强大的学习能力。通过从图像中学习各种操作任务,Skew-Fit成功实现了用真实机器人开门的任务。这一成果不仅验证了算法的有效性,也为未来机器人操作技术的发展提供了新的思路。
结论
Skew-Fit算法通过结合最大熵目标分布、极端值理论和混合模型,在强化学习领域取得了显著突破。其在机器人操作任务中的成功应用,展示了该算法在实际场景中的巨大潜力。未来,随着算法的不断优化,Skew-Fit有望在更多复杂任务中发挥重要作用。
通过以上分析,我们可以看到Skew-Fit算法在理论和实践中的双重创新,为强化学习和机器人操作技术的发展提供了新的方向。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
暂无评论...




AI-magic收录了大量国内外AI工具箱,包括AI写作、图像、视频、音频、编程等各类AI工具,以及常用的AI学习、技术、和模型等信息,让你轻松加入人工智能浪潮。