
智能机器人技术的定义与标准
智能机器人技术作为现代科技的重要组成部分,其发展离不开国际标准化组织和中国国家标准的规范与指导。根据国际标准化组织(ISO)的定义,机器人是一种能够通过编程和自动控制执行复杂任务的机器装置。中国国家标准则进一步细化了这一定义,强调机器人应具备感知、决策和执行能力,能够适应多变的环境并完成特定任务。
多模态感知系统的创新应用
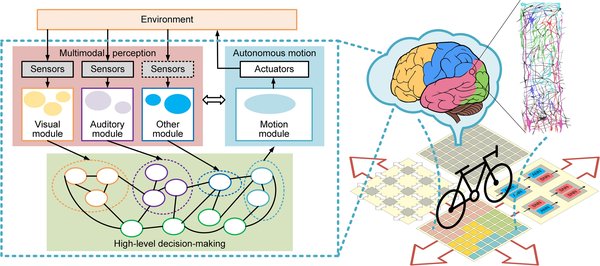
多模态感知系统是智能机器人技术的核心之一,它通过整合多种传感器数据,实现对环境的全面感知。例如,在智慧化工园区中,多机器人协同全域感知与智能决策系统通过仿生感知和深度学习技术,实现了对复杂环境的动态信息感知与模型表示。这种系统不仅能够全面感知环境,还能预测潜在的安全风险,显著提升了机器人的智能化水平。
多模态感知系统的关键技术
- 仿生感知技术:模仿生物感知机制,提高机器人的环境适应能力。
- 深度学习技术:通过大数据训练,提升机器人的决策能力。
- 多传感器融合:整合多种传感器数据,提高感知的准确性和全面性。
动力学模型在机器人中的应用
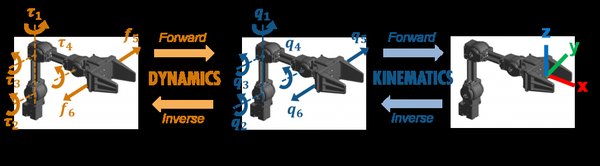
动力学模型是机器人运动控制的基础,它通过数学建模描述机器人的运动规律。在智能机器人领域,动力学模型的应用主要体现在以下几个方面:
- 运动规划:通过动力学模型优化机器人的运动路径,提高运动效率。
- 力控制:在需要精确力控制的场景中,如医疗手术机器人,动力学模型能够确保操作的精确性和安全性。
- 能耗优化:通过动力学模型分析机器人的能耗,优化能源使用,延长机器人的工作时间。
深度学习与定位导航技术的结合
深度学习技术在机器人定位导航中的应用,极大地提升了机器人的自主移动能力。通过深度学习算法,机器人能够从大量数据中学习环境特征,实现高精度的定位与导航。例如,在低空经济产业中,智能机器人通过深度学习技术,能够在复杂环境中实现自主飞行与避障,显著提高了工作效率和安全性。
深度学习与定位导航的关键技术
- 环境特征学习:通过深度学习算法,机器人能够识别和理解环境特征。
- 路径规划:基于深度学习的环境理解,机器人能够规划最优路径。
- 实时避障:通过深度学习算法,机器人能够实时感知并避开障碍物。
智能机器人技术的社会与经济效益
智能机器人技术的应用不仅推动了科技进步,还带来了显著的社会与经济效益。例如,在化工园区和涉危化的物流园区中,智能机器人系统的应用直接经济效益约2亿元,显著提升了生产效率和安全性。此外,智能机器人技术在低空经济产业中的应用,也为相关领域的发展提供了新的动力。
未来展望
随着技术的不断进步,智能机器人技术将在更多领域得到应用。未来,我们可以期待更多创新技术的出现,如更先进的动力学模型、更高效的多模态感知系统,以及更智能的深度学习算法。这些技术的应用,将进一步推动智能机器人技术的发展,为人类社会带来更多便利与福祉。
通过以上分析,我们可以看到,智能机器人技术在多模态感知、动力学模型、深度学习等领域的应用,正在不断推动技术的创新与突破。这些技术的应用,不仅提升了机器人的智能化水平,还为社会带来了显著的经济效益。未来,随着技术的进一步发展,智能机器人技术将在更多领域发挥重要作用。







